Research
My research lies at the intersection of Robotics and Machine Learning, with a focus on enabling autonomous systems to learn complex behaviours in unstructured environments.
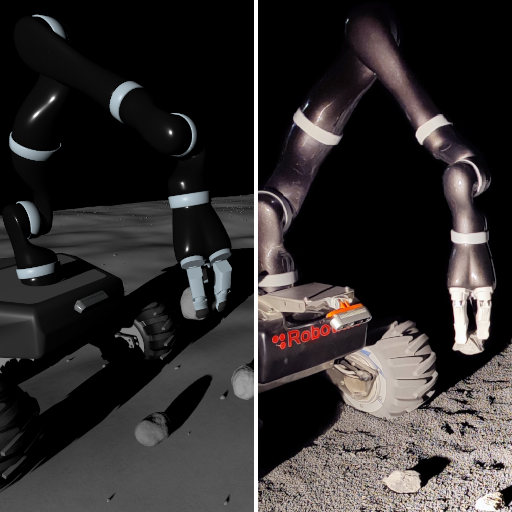
- Space Robotics: Autonomous manipulation for in-orbit servicing and planetary exploration, including contact-rich tasks such as assembly and maintenance
- Reinforcement Learning: Model-based and model-free methods for dexterous control, with emphasis on sample efficiency and reward shaping
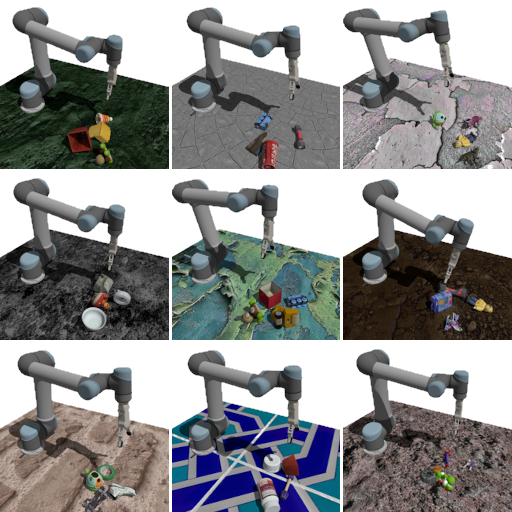
- Modeling and Simulation: Procedural scene generation, domain randomization, and high-fidelity physics for sim-to-real transfer
Publications
2025

Robot Learning Beyond Earth: Enabling Adaptive Autonomy in Space
PhD Thesis, University of Luxembourg
Learning Compliant Manipulation in Space
ICRA 2025 — Workshop on Enhancing Dexterity in Space Environments
2024
Towards Benchmarking Robotic Manipulation in Space
CoRL 2024 — Workshop on Mastering Robot Manipulation in a World of Abundant Data

2023
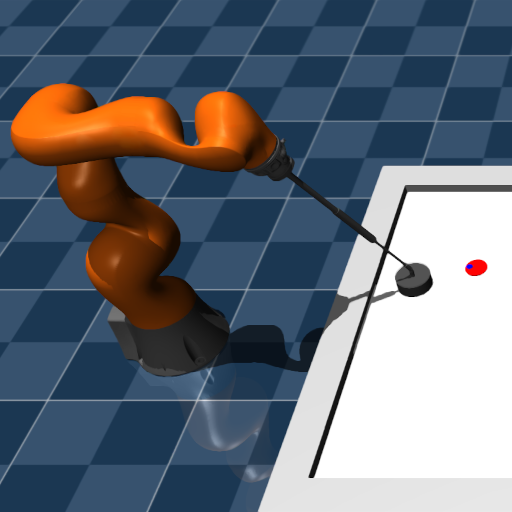
Learning to Play Air Hockey with Model-Based Deep Reinforcement Learning
NeurIPS 2023 — Robot Air Hockey Challenge
2022
2021
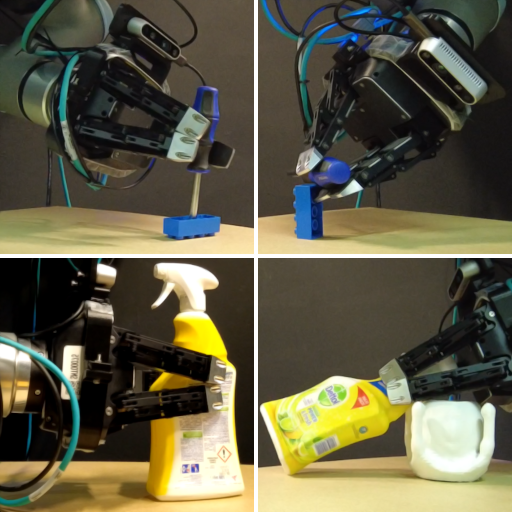
Deep Reinforcement Learning for Robotic Grasping from Octrees
Master's Thesis, Aalborg University